Here is a sample that showcases why we are one of the world’s leading academic writing firms. This assignment was created by one of our expert academic writers and demonstrated the highest academic quality. Place your order today to achieve academic greatness.
The instrumentation and the control laboratory experimentation provided a good outline for the dynamic behavior of equipment and the feedback controller.
The experiment was conducted on a surge tank control system which was equipped with a tank and installed level sensor, a pump, control vale and a digital flow meter in the outlet stream.
First the level sensor was calibrated using an Auto mode through progressively changing the set points (level %) and recording the measured signals (volts). The extent of hysteresis was also assessed using increasing and then decreasing liquid levels. The results showed that the sensor does not have a high hysteresis error and it responds well with a change in liquid level.
The control Valve was then calibrated using the Manual mode and changing the inlet variable (signal from the controller in %) progressively and recording the output variable (flow rate through the valve). The extent of hysteresis was also assessed. Plots of the valve characteristics showed that the valve could only work in a small range when set on Manual mode and the valve had a huge hysteresis error.
It needed to be reinstalled and/or replaced to get the desired results. From the practical observation it was also determined that the control valve was Fail open (FO) as it opens when no signal is obtained from the level sensor.
The feedback control loop, the importance of automatic tuning, and the effect of each term in a three-term controller on the control performance was analyzed. The performance of default control parameters by changing the three controller parameters was observed and it was concluded that the amount of effect each parameter on the system depends on various parameters and the characteristics of the system. Tuning set parameters gives stabilized P.I.D parameters.
Digital instrumentation and control have proven to be very useful in many industries and are beneficial in a wide range of applications. This usefulness is evidence of the trend of investment in digital instrumentation and control applications in the process Industry over the last 20 years (Astrom and Hagglund, 2005). Investment in automatic control systems is an important element in achieving optimal plant performance.
Instrumentation controls are the apparatuses that are used to measure physical variables such as level, density, pressure, flow current, voltage and chemical properties of a substance or a product (Alberto, 2005). The most important and basic function of function of instrumentation control is to measure and calculate the response of various device. The control systems ensure that the systems mechanism is running smoothly and the entire variables are controlled as per the process requirements.
The main objective of the laboratory experiment was to introduce our selves to the dynamic behaviour of the pilot-scale equipment and the operation of feedback controller. Understanding the role and operation of the feedback loop consisting of sensor, actuator, and controller was the principle aim.
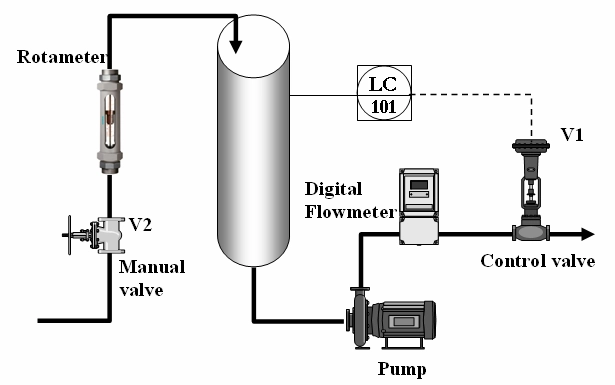
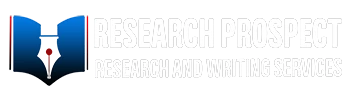
Figure 1. Flow diagram of the level control system
The plant consisted of liquid surge tank with the control valve and a pump in the outlet stream. The flow into the tank was independent of the liquid in the tank and could be set by a traditional flow metre. The outlet flow was measured by a digital flow metre which was connected just before the control valve in the outlet stream. The flow from the tank was also independent of the liquid level in the tank ( to a certain approximation) resulting the tank acting as an integrator of the difference between the flow rates. Hence control action was needed to stabilize the liquid level (restricting it from over flowing) by making one of the flow rates dependent on the liquid level
Figure 2 . Process and Instrumentatio n Diagram of the System
The objectives of the laboratory were as follows:
(1) Calibrate the level sensor in feedback loop . (2) Calibrate the control valve and studying the installed characteristics of a valve. ( 3) Study the effect of hystere sis in control valve and sensor. ( 4) Understand the dynamic behaviour of the system . 5) Evaluate manual control . 6) Evaluate the tuning of a PID control via manual and automatic tuning . 7) Evaluate the effect of positive or negative feedback on the closed loop system
Level sensor is an electronic linear device which sends a signal which is usually electric, depending on the level in the storage tank Visioli, 2006 )). The calibration of the sensor was completed by correlating signal value (volts) to the real volume in the tank . First the range of operation of the sensor’s input variable (the liquid level in the tank) and the output signal sent to the controller was determined by setting the controller to auto mode and then changing the set point on the computer to a maximum and then minimum value s (10 and 90%).The values were noted after stabilising the system to reduce error.
Then starting from the minimum value, the set points were changed progressively covering the complete range and the values of the level (in %) and the output valued from the sensor (in volts ) were The extent of hysteresis was calibrated through increasing liquid levels and then reversing the process using falling liquid levels.
The controller was set on the manual mode and the manual control input in the interface was set so that the valve was fully open. Then the inlet flow into tank was increased by
adjusting the hand valve below the flow metre such that a steady state maximum level is achieved in the tank as the water was ov erflowing keeping the tank at maximum level). This step was completed to ensure that any effect of change in level of the tank on the flow rate through control valve is eliminated.
The range of the output variable (flow rate) was then determined by setting the input variable (signal from the controller) to a maximum and minimum value that is 0 and 100% and the values of the cor responding flow rates were determined.
Then the input variable was set at a number of points covering the range and the values of t he flow rate were determined form the electronic flow rate installed in output line. The extent of hysteresis was also analysed through calibrating the process by increasing the input signal and
then decreasing sign
The controller was set on auto mod e’ and the liquid was defined to a set point. After letting the system stabilised, the controller was set to manual mode and the set point was changed . With the action of buttons in the process diagram pane, the new level was maintained to a certain approximation, and it was repeated certa in times and the observation were analysed.
The Three term controller s Propo rtional Integral Derivative (PID) are mostly used in p rocess industries Skogestad , 2006 )). It calculates the difference between the measured signal and the set value and consequently changes the valve position to reduce the error . The three parameters are proportional gain (K c), integral time (T 1 ) and derivative time (T D The controller was set on auto mode and afte r letting it get stabilised to a desired set point, the three components were changed for different set points, and their performance s were tested. Over shoots, time to reach the set point, steady state errors and the speed of the control action together with the variation in the water level was also observed and analysed T he three PID parameters were modified one by one by one in the later stage . First the P only was tested by setting T i and T d equal to zero . Then K c was set as constant , T d was set to zero T i was varied. Finally K c and T i was set as constant and T d was varied to obtain the results.
Orders completed by our expert writers are
After setting control mode on auto, and letting the system stabilise at desired set point, t he Automatic Tuning Wizard tool was started and the tuning procedure was completed . At the end of the the new parameters were automatically saved into the PID parameters tag in the controller pane l . The new controller parameters were recorded and the control performance was tested again. The P PI and PID control structures were tuned with fast , slow and normal actions.
Various sensor calibration methods were adopted to produce the results of sensor behaviour. Increasing tank level and decreasing tank level were used in the experiments . Hysteresis factor is an effective mean for the quantification of sensor behavior . Signal levels were determined from system processing and analy zed to obtain the system sensitivity .
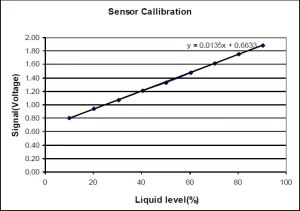
Figure 3 . Sensor Calibration relationship curve of output signal and liquid level
The results in Figures 3 to 5 shows that level sensor starts responding from the value of 0.633 volts and reaches to a maximum value of 2 volts approximately. The level sensor is also more sensitive while increasing liquid level (hysteresis). The sensitivity of the sensor (or the gain) is 0.0135 volts per 1% increase in liquid level.
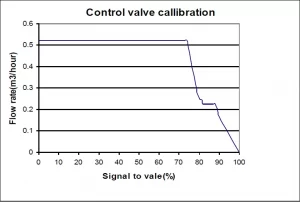
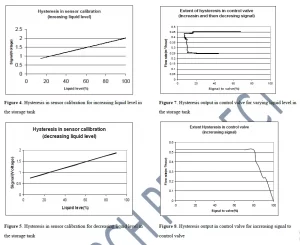
Figure 6. Hysteresis in sensor calibration for decreasing liquid level in the storage tank
The recorded values and the plots show that the control valve mal-functions in a certain range. When set on manual mode, it only operates in very narrow range; in between 80 to 100%. The control valve also behaves differently when operated with increasing and/or the decreasing the signal strength, which concludes that the system has a high hysteresis error. Different values were obtained for the flow rate through the control valve at the same input signal (as the procedure was repeated multiple times). The best values were used to calculate the plots shown above.
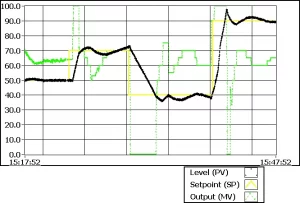
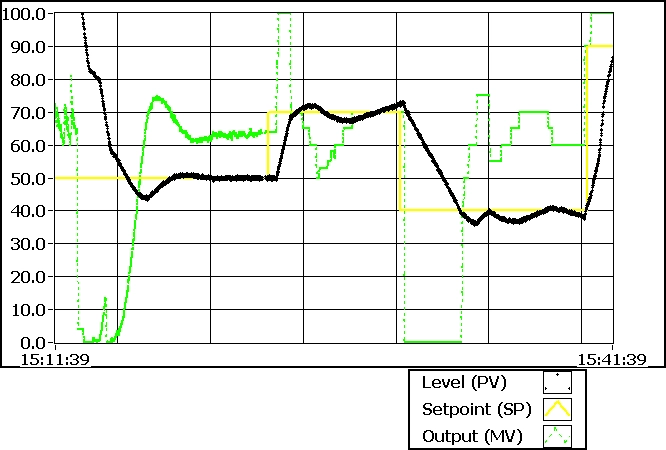
Figure 9 . The change in Tank level with respect to change in the Set
point with manual control
To get the level of the tank close to that set value, a larger % change to the control valve had to be made as the level sensor was not very sensitive
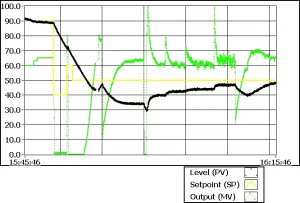
Figure 10 . Tank level with respect to change in the Set point
When Ti and Td are kept are 0 value and changing the values of K c , the volume i n the tank never touches the set point value. Increasing K c reduces error but it greatly increases the valve body vibration which might cause damage to the valve.
Figure 11 . Volume variation with changing control inputs
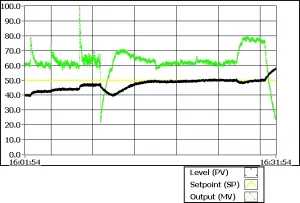
Figure 12 . Volume variation with changing control inputs
Fixing K c and varying but keeping T d = 0 shows that the increase in T i does not does not considerably change the volume . It shows a steady state error with low % and it also reaches close to the set point at reasonable rate. By changing T i , the vibration in the Valve is not affected
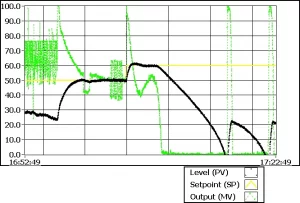
Figure 13 . Volume response with changing control inputs
By fixing K c and Ti but varyin g T d increases the error. Reducing the T d value decreases the error and the vibration in the valve. Tuning the set parameters increases the vibration of the valve body without any change in % error and gives a stabilised P.I.D or P.I parameters. When the valve is fully open, the maximum flow rate through the valve is 0.532 m 3 / If the inlet flow rate exceeds this value, the system will never get stabilised because the tank will then act as an integral of the flow rate difference. Changing the sign of t he controller gain Kc completely alters the system as shown below in the diagram
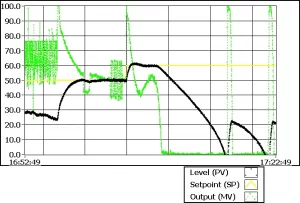
Figure 14 . System response with negative input control
For the valve actuator x = a.u +b, where a and b are constants, x is the stem position and u is input signal
Digital instrumentation and control of fluid level system can be utilized through feedback control. The effluent flow and level in the tank can be controlled through adjustment in the control variables . A schematic Proportional, Integral an d derivative controls were applied on the level tank fluid transfer system.
The results showed that the system performance can be optimized with the application of optimum control parameters and values. The experimental analyses on the system showed that t he level sensor starts respo nding from the output value of 0.633 volts and reaches to a maximum value of 2 volts during operations The sensitivity of the sensor was observed as 0.0135 volts for every one percent increase in liquid level under steady state conditions. The range of the control valve operation was determined to be between 80 to 100% when operating under manual mode.
Automatic fine t uning of the control parameters resulted in
increased vibration of the valve body However, s tabilised
P.I.D or P.I parameters can be obtained through both
manual and automatic tuning of the system parameter
Alberto, L.
L., Auto tuning proces s controller with improved load disturbance re jection. J. Process Control , 15, 223−234
Astro
m, K. J and Hagglund, T. T., 2005. Adva nced PID
Control; International, Society of Automation: R esearch
Triangle Park, NC.
Hagglund, T., 2005.
Indus trial implementation of on line performance m onitoring tools. Co ntrol Eng. Pract.
Jain, M. and Lakshminarayanan, S. S., 2005. A filter based approach for performance assessment and enhancement of SISO con trol systems.Ind. Eng. Chem. Res.
Jelali, M. M., 2006. An overview of control performance assessment technology and industrial applications . Control Eng.
Pract, 14, 441−466 Ko, B. S. and Edgar, T. F. F., 2004.
PID control performance assessment: The single loop case. AIChE J.
Michael, W. F., Julien, R. H. and Brian, R. C. C., A comparison of PID controller tuning methods. Can. J. Chem.
Eng , 83, 712 − Peter, K. and Alexan der, H. H., Detec tion of sluggish control loops: experiences and im provements. Control Eng.
Pract. 1029− 1025. Skogestad, S., 2006.
Tuning for smo oth PID control with acceptable disturbance reje ction. Ind. Eng. Chem. Res , 45, 7817−7822
Visioli, A.
A., Method for proporti onal integral
controller tuning asses sment. Ind. Eng. Chem. Res , 45,
2741−2747
To write an undergraduate academic report:
All work is written by human writers. 100% AI free, guaranteed.

100% money back guarantee if you find plagiarism in our work.
COMPANY DETAILS